-
Par papynet le 14 Août 2022 à 08:02
Je vous ai expliqué hier quels étaient les principes de l'impression 3D. Aujourd'hui, je vais vous donner des exemples de machines. Mais avant cela, un peu d'historique.
En 1972, dans Tintin et le lac aux requins, le professeur Tournesol invente une photocopieuse tridimensionnelle , que le méchant Rastatopoulos veut utiliser pour fabriquer des faux en dupliquant des œuvres d'art volées dans de grands musées.!
Il y avait effectivement des études en cours aux USA, mais les premiers essais véritablement prometteurs sont réalisés au japon en 1980 par Hideo Kodama, et le premier brevet concernant la « fabrication additive » est déposé, par trois Français pour le compte de la Compagnie industrielle des lasers (Cilas Alcatel), le 16/7/1984.
Les premières imprimantes 3D apparaissent au début des années 2000 et utilisent des résines, peu adaptées à cet usage et elles ne produisent que des prototypes. Ce sont plutôt des machines d'étude.
Depuis 2010, la précision de l'impression et les types de matériaux utilises augmentent considérablement. On utilise des matières plastiques, des métaux, du sable, fondus, et même du béton.
A coté de petites machines utilisant des plastiques qui servent à des laboratoires ou dans l'enseignement, voire à des particuliers, apparaissent des machines industrielles, utilisant notamment des métaux, dans l'industrie automobile et aéronautique.
Des petites machines sont aussi utilisées par les prothésistes dentaires et la bijouterie.
D'énormes machines sont utilisées par l'industrie du bâtiment, notamment pour la construction de maisons individuelles.
L'industrie pharmaceutique a "imprimé" des pilules de médicaments et la recherche médicale fait réaliser des prothèses sur mesure et essaie de déposer des cellules humaines, notamment des cellules-souches.Je vais vous décrire rapidement trois imprimantes 3D.
Une imprimante domestique.
 Le constructeur chinois Flashforge s’est spécialisée dans les imprimantes 3D, entrée de gamme, pour un usage domestique. Cela n’empêche pas la stabilité et la précision des travaux rendus avec une moyenne de 0,2 mm.
Le constructeur chinois Flashforge s’est spécialisée dans les imprimantes 3D, entrée de gamme, pour un usage domestique. Cela n’empêche pas la stabilité et la précision des travaux rendus avec une moyenne de 0,2 mm.
La structure de la machine Voxelab Aquila est métallique (voir photo ci-contre) et elle peut être pilotée par un PC ou un Mac. Le volume d'impression est de 220 x 220 x 250 mm.
Un plateau support très rigide se déformera peu et des guides à rousseau assurent son déplacement horizontal perpendiculaire à un portique assure les déplacements latéraux et vertical. Une bobine fournit des fils de plastique, dont la fusion permettra la construction de la pièce.
La machine est livrée dans un kit de montage et coûte chez Amazon, entre 170 et 200 €Une petite imprimante professionnelle :
 L'imprimante 3D Dremel permet d'utiliser toutes sortes de filaments plastiques, et est destinée à des équipes d'étude pour la création d’objets et de prototypes.
L'imprimante 3D Dremel permet d'utiliser toutes sortes de filaments plastiques, et est destinée à des équipes d'étude pour la création d’objets et de prototypes.
La zone d’impression est fermée avec système de filtration et de refroidissement optimisé pour éviter les dépôts de poussière et les dégagements de fumées.
L'impressions 3D est de haute qualité avec une résolution jusqu’à 50 microns sur un plateau chauffant pour éviter les déformations. elle est gérée à distance par connection Wi-fi à un ordinateur et une caméra HD intégrée. La dimension max des objets est de 40 x 50 cm et 40 de haut.
Elle coûte environ 600 €Une machine industrielle "pièces plastiques"
 L'imprimante 3D "Startasys F900" est destinée à réaliser des pièces en plastique de grandes dimensions (914 x 609 x 914 mm), notamment pour l'aménagement interne des trains et avions commerciaux. Elle peut utiliser toutes sortes de matériaux plastiques,allant des thermoplastiques de qualité technique aux polymères à hautes performances.
L'imprimante 3D "Startasys F900" est destinée à réaliser des pièces en plastique de grandes dimensions (914 x 609 x 914 mm), notamment pour l'aménagement interne des trains et avions commerciaux. Elle peut utiliser toutes sortes de matériaux plastiques,allant des thermoplastiques de qualité technique aux polymères à hautes performances.
Les hauteurs de couches varient de 0,1 à 0,5 mm.
L'impression se fait à partir des dessins de conception des pièces en CAO (conception assistée par ordinateur), qui génèrent les données numériques
La précision obtenue est de l'ordre du 1/10ème de mm.
Des caméras internes permettent de gérer la fabrication.
Le prix varie avec les configurations de la machine. Il est de l'ordre de 400 000 € HT.Une machine industrielle "pièces métalliques"
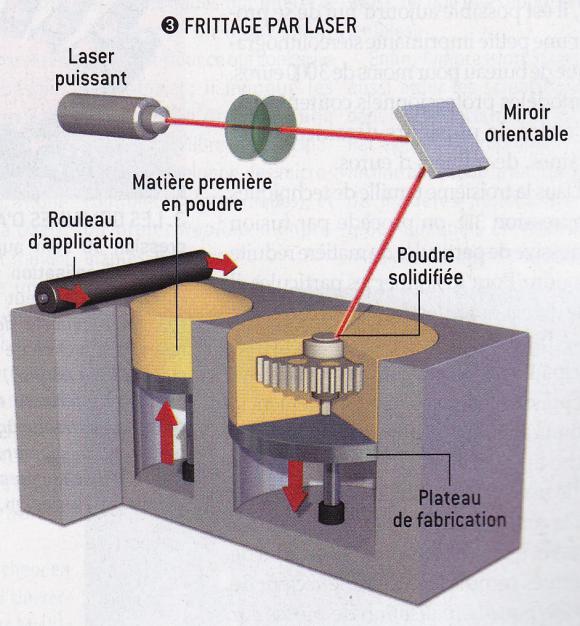
La plupart des imprimantes 3D pour pièces métalliques utilisent un laserpuissant pour échauffer localement la poudre et ainsi faire fusionner ses particules, couche après couche.
Les imprimantes à frittage par laser sont de grande taille et coûtent plusieurs centaines de milliers d’euros quand leur automatisme permet une production de série, par exemple de boitiers, de coques, de pièces de mécanismes, et notamment des pièces du domaine aéronautique ou spatial, précises et de très haute résistance..…
On peut ainsi "imprimer" acier, titane, cobalt, chrome, acier inoxydable, mais aussi or, argent, bronze ou platine...Les machines ne sont évidemment pas polyvalentes, mais adaptées à un type particulier de poudre.
L'imprimante "MétalX" est originale car exploitant un autre procédé (photo ci-dessous)

 L'imprimante 3D Metal X vient déposer couche par couche du filament composé de poudre de métal et de liant (cire + polymère). Un pièce dite" verte" est ainsi fabriquée. Elle est ensuite traitée dans une machine de déliantage pendant plusieurs heures, qui , grâce à des solvants spéciaux, retire la cire de la pièce (qui perd 4% de son poids).
L'imprimante 3D Metal X vient déposer couche par couche du filament composé de poudre de métal et de liant (cire + polymère). Un pièce dite" verte" est ainsi fabriquée. Elle est ensuite traitée dans une machine de déliantage pendant plusieurs heures, qui , grâce à des solvants spéciaux, retire la cire de la pièce (qui perd 4% de son poids).
La pièce est alors mise dans un four de frittage, qui suit une courbe de chauffe précise en fonction de la pièce à fabriquer (plusieurs heures voire 24h). Pendant la cuisson, les particules de métal fusionnent entre elles et il se produit un retrait de 20% de la taille de la pièce, lequel avait été compensé en amont lors de l’impression. Le délai total de fabri-cation est de l'ordre de 3 jours.
Des métaux très divers peuvent être utilisés : acier, acier inoxydable, acier à outils, titane, cuivre. Ci contre une pièce fabriquée (une matrice d'extrusion)
La Metal X possède un volume d’impression de 300 x 220 x 180 mm avec une précision de 50 microns. Le budget global de l'installation est de l'ordre de 200 000 €Des imprimantes 3D dans l'industrie du bâtiment.
Leurs dimensions sont impressionnantes, mais le principe reste le même. La plupart déposent des cordons de béton les uns sur les autres. Cela permet des formes très diverses et l'inclusion de renfort, dans le béton, tel la fibre de chanvre qui est un bon isolant thermique. photo ci-dessous).
L'impression 3D permet des gains importants de temps de construction permet une emprunte carbone plus faible.

 votre commentaire
votre commentaire
-
Par papynet le 13 Août 2022 à 08:23
Je ne sais pas si vous vous êtes servi d'une imprimante 3D. Ce type de matériel n'est pas encore de façon courante dans les ménages, car nous ne nous en servirions pas assez souvent. S'il est facile de se servir d'une machine simple d'entrée de gamme, par contre réaliser complètement la création d'une pièce est assez complexe et nous n'y sommes pas encore habitués.
Mais c'est une expérience intéressante et c'est pour cela que j'ai voulu faire deux articles à ce sujet.Quand on veut réaliser une pièce particulière, si elle est en plastique ou en métal, on peut la mouler dans un moule dont l'intérieur est une cavité ayant la forme et les dimensions de la pièce.
Mais il faut avoir à l'origine un dessin de la pièce, des moyens pour fabriquer le moule, et pouvoir injecter le plastique ou fondre le métal. Ce n'est pas à la portée d'un particulier.
S'il s'agit d'une pièce en bois, vous pouvez la réaliser avec une scie, un rabot, une rape et tous ces outils peuvent être électriques ou à main. Vous pouvez l'usiner avec un tour ou une fraiseuse, mais il faut en être équipé et donc en avoir un usage suffisant. Dans les deux cas, on part d'une pièce cylindrique ou parallélépipédique et on lui enlève de la matière peu à peu, pour parvenir à la pièce définitive. Il faut avoir un dessin coté 2D de la pièce.
C'est la même chose pour du métal, on agit "par soustraction" avec un tour pour enlever des épaisseurs, sous forme de copeaux, sur des formes cylindriques, ou une fraiseuse pour les formes parallélépipédiques. Ce sont des machines encombrantes, lourdes, et chères; pour être un bon tourneur ou fraiseur, il faut au moins.deux ans d'apprentissage.
Pour faire des pièces uniques, l'ouvrier va régler ses outils et la vitesse de la machine, pour chaque passage successif d'enlèvement de copeaux (en général en aspergeant d'huile pour faciliter l'usinage et refroidir le métal), et c'est un travail qui nécessite de bien connaître sa machine et le travail du métal, et de sentir à la vue et l'oreille ses réactions.(il s'agit de respecter les cotes, sans casser d'outil !).
Lorsque l'on veut faire des séries de pièces, on utilise des machines dites " à commande numérique", dans lesquelles un ordinateur est associé à la machine, dans lequel on rentre les données de l'usinage, et qui dirige automatiquement le travail de la machine. Un ouvrier peut alors régler et surveiller plusieurs machines qui travaillent simultanément.
Ci-dessous les photos d'un tour, d'une fraiseuse et d'une machine à commande numérique.


Depuis le milieu du siècle dernier, les ingénieurs rêvaient de réaliser des pièces autrement, non par soustraction, mais par addition, en réalisant les pièces en volume par ajout de matière progressif en couches successives minces depuis une modélisation 3D de la pièce, au lieu d'un dessin 2D. La machine s'appelle "imprimante 3D".
Le terme « d’impression » est trompeur. Certes on dépose les diverses couches comme on dépose de l’encre en couche très fine sur du papier, mais les machines sont très différentes des imprimantes de textes utilisées par les micro-ordinateurs.
Le matériau de base, qui peut être du plastique, du métal, du sable, etc., est déposé (ou non) par une « tête d’impression » sur un plateau horizontal. À chaque balayage horizontal de la tête d'impression, une couche est ainsi formée. Un déplacement vertical de la tête ou du plateau permet alors de passer à la couche suivante.
L’objet est ainsi fabriqué couche par couche, avec des pertes de matière minimes, et la possibilité de réaliser des formes inaccessibles aux procédés habituels.La première chose à savoir est que l’imprimante 3D n’invente pas une pièce, elle la reproduit à partir d’un modèle numérique. Si vous voulez faire une pièce donnée, il faut en posséder un dessin « 3D », c’est à dire une description numérique de la pièce, qui consiste à avoir toutes les coordonnées x,y,z des point de la pièce dans un espace à 3 dimensions.
La machine va successivement se positionner sur toutes les hauteurs z et déposera de la matière sur tous les points de coordonnées x,y, pour chaque hauteur particulière. Peu à peu, la pièce sera ainsi construite, plan par plan horizontal, et sera terminée quand le dernier plan de hauteur maximale sera déposé.
Alors comment avoir cette description 3D de la pièce.?
Plusieurs cas :
- la pièce est étudiée et conçue par un bureau d’étude à partir d’un logiciel de dessin 3D. L’ordinateur décrit alors la pièce par cet ensemble de coordonnées x,y,z, et il suffit alors que ces données soient écrites sous un format lisible par l’imprimante.
- on possède une pièce qu’on veut reproduire. On peut alors numériser sa forme grâce à un « scanner 3D » Les caméras du scanner parcourent l’espace autour de l’objet, exactement comme lorsqu’on vous fait un scanner médical d’un organe, et le logiciel associé calcule à partir des données visuelles recueillies, tous les x,y des points de la pièce pour chaque hauteur z. Ce fichier est alors utilisable par l’imprimante. Il existe des scanners plus ou moins complexes et performants, dont le prix va de quelques centaines à quelque milliers voire dizaines de milliers d'euros pour des usages industriels.
Trois photos de scanners de bureau ci-dessous.


- pour certaines pièces simples, des logiciels de dessin 3D gratuit ou peu onéreux existent, permettant de les décrire numériquement. J’en ai utilisé et ce n’est quand même pas évident pour quelqu’un qui n’aurait jamais fait de dessin industriel.
Supposons donc que la machine ait reçu une description numérique de votre pièce; comment va t’elle faire ?
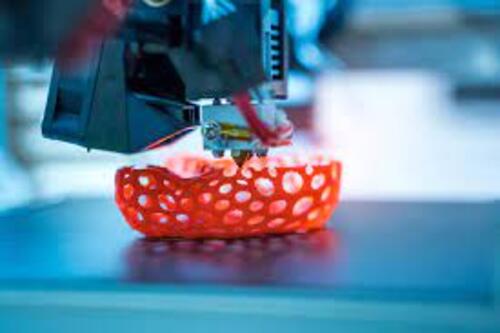
Je vais décrire ici le processus d’une imprimante simple d’utilisation compacte, facile à réparer et bon marché, souvent proposée en kit à monter soi-même, mais évidemment moins précise, qui va réaliser des pièces en plastique. Elle fonctionne en déposant du plastique (acrylonitrile butadiène styrène ou de l’acide polvlactique) à partir d’un filament préalablement fondu dans une tête d’extrusion chauffante.(un peu comme dans les pistolets à colle).
La tête se déplace horizontalement et dépose une première couche de l'objet désiré sur le plateau d'impression. Un déplacement vertical permet de passer à la seconde couche et ainsi de suite.
Dans la figure ci-dessous, on veut réaliser un double engrenage en plastique.
La qualité d'une impression 3D dépend de deux principaux paramètres :
- la résolution horizontale s’exprime, comme pour une imprimante de textes ou photos,en nombre de points par pouce (dpi) et correspond au nombre de particules de matière que la machine est capable de déposer par unité de surface.
- la résolution verticale est l'épaisseur de couche, mesurée en micromètres ou en millimètres. L'épaisseur déposée dépend en partie de la nature des pièces.
Les pièces sont réalisées avec une précision de l’ordre de quelques dixièmes de mm avec ces imprimante à fil plastique, et dans un temps très court, (croissance de plusieurs centimètres par heure dans la direction verticale; cela dépend de la surface de la pièce).
Je connais plusieurs personnes qui avaient cassé une pièce qu’on ne trouvait pas dans le commerce, car appartenant à une machine qui n’était plus construite, et qui ont ainsi réalisé des pièces très satisfaisantes, le problème principal étant d’avoir le fichier numérique de définition.Demain je vous montrerai quelques imprimantes 3D
votre commentaire
-
Par papynet le 12 Octobre 2021 à 08:04

Hier je parlais de Paro, le phoque dans les hôpitaux et maisons de viellards, et de Pléo, le dinosaure, compagnon des enfants.Ce qui est certain c’est que Paro plaît aux personnes âgées qui ont moins l’impression d’être seules, un peu comme si elles avaient un chien ou un chat. Quant aux petits enfants, Pléo est plus qu’un compagnon, c’est presque un frère. Non seulement c’est un compagnon de jeu, mais il est de leur âge, et ils s’aiment mutuellement.Cela intrigue les psychologues qui se demandent quelle peut être la relation homme-robot, aujourd’hui et demain avec des robots de plus en plus mimétiques de l’être humain.
Ce que nous aimons dans notre chat ou notre chien, c’est qu’ils aient des comportements, qui nous ressemblent et qu’on ait le sentiment qu’ils se comportent comme nous, surtout sentimentalement. On n’aime pas une bête qui vous déteste, on ne s’attache à elle que si elle nous aime.
Les études de psychologie ont montré la même chose : les robots sont d’autant mieux perçus qu’ils nous rappellent nos congénères, animaux ou hommes.
Mais si les « robots animaux » apportent une compagnie aux enfants et aux personnes se sentant très seules, les études montrent que des robots ressemblant trop à l’homme et ayant un comportement très humain inquièteraient plutôt. On sait qu’ils ne peuvent remplacer un être humain et on craint alors qu’ils nous supplantent, étant plus résistants que nous. Cela dit de tels robots n’existent que dans les films et romans de fiction.
Cependant des robots ayant la forme humaine, et peu performants par rapport à l’homme sont mal acceptés, de même d’ailleurs que des robots chiens ou chats. Les japonais qui avaient mis en service des robots-serveurs dans les cafés, ont fini par les supprimer, car la clientèle, après un temps d'intérêt par curiosité, ne les aimait pas
Les études semblent montrer que nous sommes d’autant plus enclins à attribuer à des robots des qualités humaines, qu’ils nous ressemblent physiquement. (c’est vrai aussi pour un robot ayant l’aspect d’un animal domestique, auquel nous attribuons tous les comportements de cet animal). Quand il ne se comporte pas comme on s’y attend (par manque de performances), cela nous perturbe.
De plus ces études montrent que le robot n’intéresse que s’il a une utilité : pour les enfants ou les vieillards, c’est de venir soulager leur solitude. Pour les adultes qui n’ont pas ce problème, il faut que le robot ait une autre utilité, domestique par exemple. Mais la valeur sentimentale en est alors exclue
Cependant dans des expérimentations où le robot était mêlé à un jeu, une certaine relation s’établissait entre l’homme et la machine, car l’homme essayait alors de comprendre son raisonnement, comme il le fait face à un autre humain. Il finissait par parler de ce robot, comme si c’était un ami avec lequel il jouait.
Ceci rejoint ce que les psychologues appellent la « théorie de l’esprit », nom qui, personnellement, me paraît prétentieux et peu adapté.
Qu’est ce que cette théorie, qui a été imaginée, en 1978, par des spécialistes américains des primates, David Premack et Guy Woodruff, de l’Université de Pensilvanie ?
La théorie de l'esprit est notre capacité à attribuer à autrui un état mental différent du nôtre, de l’évaluer et d'en déduire des conclusions quant à son comportement, ce qui implique de créer un modèle mental de l'autre ; (on aurait mieux fait de parler de modélisation au lieu de théorie !).
Cette modélisation semble être une caractéristique exclusivement humaine ; elle n'a pu être démontrée que sous forme rudimentaire chez les primotes et est très frustre chez les autres mammifères.
Dès leur plus jeune âge, les enfants forment des représentations mentales : par exemple, ils suivent le regard d'autrui, et ils comprennent qu’ainsi, en observant ce que regarde l’autre, ils vont en déduire des informations.
Cette capacité de « théorie de l'esprit » n'est entièrement développée que lorsque l'enfant comprend que les autres personnes ne disposent pas nécessairement des mêmes informations que lui, et n’en tirent pas forcément les mêmes conclusions.
Le but est évidemment de comprendre et d’anticiper les intentions d’autrui.
Les enfants dont le développement est normal maîtrisent cette capacité entre quatre et cinq ans; toutefois ils commencent à s’y exercer dès un an à 18 mois.. Les enfants autistes n’en sont souvent pas capables avant l’adolescence.Mais l’observation n’est pas simple, car il est parfois difficile de différencier ce qui découle d’une bonne connaissance des comportements de l’autre, d’une projection des représentations ou des croyances. : on peut percevoir et comprendre les conduites d’autrui en se réglant sur son comportement habituel et sans forcément lui prêter un « esprit », ou des « croyances ». C’est ce que font les animaux. En fait il faut se mettre à la place de l'autre.
Des chercheurs se sont demandés si les étapes d’acquisition de la théorie de l’esprit étaient universelles. C’est le cas, d’après une enquête menée auprès d’enfants appartenant à cinq cultures différentes : le Canada, l’Inde, Samoa, le Pérou et la Thaïlande. Partout, la théorie de l’esprit est définitivement acquise avant l’âge de 5 ans. (Evidemment on fait des progrès ensuite)
Une autre piste de recherche porte sur les liens entre théorie de l’esprit et le langage. Après avoir fait de la théorie de l’esprit une condition d’apparition du langage, on pense aujourd’hui que le développement des deux aptitudes est une « co-évolution » de l’intelligence.
Lors de tâches de ce domaine, deux zones du cerveau sont particulièrement actives, le cortex préfrontal médian, et une zone entre le lobe pariétal et le lobe temporal. L’amygdale et le cortex cingulaire sont aussi activés.
Il est curieux de constater que lorsque nous sommes devant un animal de compagnie, ou devant un robot tel que Pléo, et que nous l’observons pour déterminer ensuite nos actes et nos relations mutuelles, ce sont ces mêmes zones qui s’activent dans notre cerveau, et ce, d’autant plus qu’ils ont une attitude humaine. Cela n’intervient pas si nous observons un robot d’aspirateur, tondeuse ou de cuisine.
La théorie des "neurones miroirs" est aussi une des explications de ces capacités humaines de modélisation de la pensée d’autrui votre commentaire
-
Par papynet le 11 Octobre 2021 à 08:08
Comme toute personne un peu curieuse je m'intéresse aux robots et à la robotique. Mais les robots qui coupent l’herbe ou qui aspirent automatiquement votre appartement ne sont pas tellement extraordinaires, et s’ils sont utiles, ne sont pas spécialement sympathiques.
J'ai montré hier quelques figures de robots, alors parlons un peu de ces personnages et d'abord des roots de compagnies, très utiles aux personnes âgées et aux enfants surtout lorsqu'ils sont malades à l'hôpital..
Dans cet article je vous en décrirai deux et demain je m’intéresserais aux aspects psychologiques du contact homme-robot.PARO :


Voici d’abord PARO, le petit phoque aux vertus thérapeutiques, destinés aux vieillards qui finissent leur vie en maison, Ehpad ou à l’hôpital et souffrent de la solitude.
Les premiers prototypes de Paro, développés par Takanori Shibata, de la société AIST, datent de 2001, après une longue étude commencée en 1993. Ce bébé phoque aux grands yeux noirs est recouvert d'une fourrure blanche synthétique, hypoallergénique, antibactérienne et très peu salissante. Son squelette métallique contient des centaines de capteurs tactiles reliés à une petit ordinateur, ainsi que d'autres capteurs - lumière, son, position et température - qui lui permettent d'interagir de plus en plus finement avec son utilisateur, le tout protégé par un bouclier électromagnétique afin de ne pas dérégler un pacemaker ou des appareils électroniques de mesures physiologiques.
Ce robot est doté d’un programme qui lui permet un certain apprentissage et d’apprendre peu à peu au contact des hommes, à interagir selon les comportements de ses utilisateurs. Ainsi lorsqu'une personne touche Paro, il s'anime, bouge la tête, la queue, cligne des yeux, les ferme quand on le caresse et émet des petits cris semblables à ceux d'un véritable bébé phoque. Paro se blottit contre l'utilisateur, lui réclame de la "nourriture" (une recharge de sa batterie via une prise-tétine) ; il est également capable de mémoriser le nom qu'on lui donne, il apprécie les remerciements et les félicitations. Il peut aussi exprimer différentes émotions : la surprise, le bonheur ou même la colère. Il reconnaît le jour et la nuit pendant laquelle il dort. Il a été homologué par l’autorité américaine du médicament.
Auparavant, les Japonais avaient expérimenté d'autres robots animaux, chiens (Aibo) ou chats. Mais même s'ils s'avéraient attachants, les utilisateurs finissaient toujours par les comparer à de vrais animaux domestiques, ce qui est forcément décevant. Avec Paro, cet écueil est levé (personne ou presque ne sait comment se comporte au quotidien un bébé phoque...).
Plus de 3000 exemplaires sont en service, mais son prix est élevé, environ 6000 € .PLEO


Le robot PLEO est encore plus extraordinaire : c’est un petit « dinosaure de compagnie » de 48 cm de long, vert aux yeux bleus, qui arrive chez vous comme un bébé et devient enfant, puis adolescent (d’esprit, mais il ne grandit pas en taille !). Il a été v-créé au Japon, mais est commercialisé par la firme Innvo Labs Corporation, basée à Hong Kong et aux USA.
Pléo est complexe : sous une peau en caoutchouc, il comprend 6 ordinateurs, (deux « intelligents », et 4 de servitudes et automatismes), 14 moteurs, une centaine d’engrenages, iun système de vision à caméra infrarouge, des micros et haut-parleurs, des capteurs de posture et d’inclinaison, des capteurs dans la peau et un capteur infrarouge dans la bouche pour détecter les aliments..
Pléo est capable d’apprentissage et d’adaptation. Pléo est d'abord un nouveau-né, il ouvre ses yeux pour la première fois, s'ajuste sur la luminosité et sur le son. Il commence à essayer d'avancer maladroitement puis apprendra à "marcher" correctement, en fonction des entraînements proposés par son maître. Petit à petit il développe sa propre personnalité aux côtés de son propriétaire.
Pleo, dort, mange, pousse de petits rugissements, se promène tout seul et réagit aussi aux sollicitations extérieures et à la moindre caresse. Il explore son environnement, étudie votre doigt et va jusqu’à vous lécher la figure.
PLEO est sensible au temps qui passe, ainsi il est capable de reconnaitre le jour de la nuit, l'heure du déjeuner ou de la sieste, et il vous le fera savoir si vous l'avez oublié !
Puis il devient adolescent et développe des émotions : curiosité, étonnement, peur ; il peut être joyeux et joueur, vexé ou honteux, (si vous lui faites des remontrances). Mais comme avec un animal, vous avez l’impression qu’il vous aime. Vous lui apprenez son nom, mais vous pouvez lui apprendre à danser et à chanter, mais pas encore à lire et écrire lol.
Pléo ne coûte pas cher compte tenu de sa complexité, environ 450 €. Il s'en est vendu des milliers d'exemplaires, mais il semble qu'il soit indisponible à la vente actuellement (https://www.bestofrobots.fr/pleo-reborn-innvo-labs-robot-compagnon.html)Comment est ce possible qu’un robot puisse apprendre ainsi ? On a copié sur l’homme .
Je vous ai souvent parlé des centres d’apprentissage, où quand vous essayez er vous faites mieux que la fois précédente, certains neurones sécrètent un neurotransmetteur : la dopamine. Cela incite à continuer dans la même voie ; au contraire si l’essai est moins bon, l’absence de dopamine vous incite à recommencer autrement.
Chez l’animal, quand vous le dressez, vous lui donner une récompense quand il réussit, un poisson à un phoque, une otarie ou un dauphin, de la viande au tigre, un petit bout de chocolat au chien … (mais une souris d'ordinateur au chat, cela ne marche pas !).
Le robot, c’est pareil, chaque fois qu’il réussit, qu’il progresse, un signal électrique le lui dit : c’est l’équivalent de la dopamine ou de la récompense. Evidemment pour l’instant c’est limité à des tâches simples : il n’y a que des ordinateurs et pas un vrai cerveau derrière. C’est pour cela qu’il vaut mieux un robot phoque ou dinosaure. Avec un robot chien, on se rendrait trop vite compte de la différence avec une bête réelle, dotée d’un vrai cerveau. Par contre on pourra un jour apprendre à un robot à parler correctement, à lire et à écrire ; pas à un animal (sauf les singes supérieurs auxquels on apprend le langage des sourds-muets). votre commentaire
-
Par papynet le 25 Août 2021 à 08:24


Je vous ai décrit hier les résultat de l’étude par l’université d’Harvard, d’un petit robot d’abeille « Robobee », de 3 cm d’envergure et pesant moins d’un gramme.
Aujourd’hui, je vous parlerai de la partie informatique de l’étude, non pour contrôler le vol du robot, mais pour lui permettre de se repérer, de se guider et de programmer ses actions et l’activité de nombreux robots, « butinant » ensemble.Les robots habituels ont à bord des accéléromètres et des gyroscopes qui leur donnent le moyen de reconstituer leur trajectoire et de se repérer sur des cartes géographiques numérisées. Mais un tel mécanisme serait trop lourd pour notre robot-abeille.
Les chercheurs ont essayé d’imiter la vision des abeilles, avec un système visuel simple, mais efficace, qui analyse le mouvement des objets dans le champ visuel d’un « œil » capteur d’images. Les objets proches se déplaçant plus vite dans le champ que les objets éloignés, on peut utiliser cette information pour « calculer » une représentation tridimensionnelle de l’environnement. Toutefois ce processus demande un traitement important et donc un calculateur performant, d’autant plus que le « cerveau » du robot doit ensuite prendre des décisions pour diriger son vol et commander ses actionneurs.
Les microprocesseurs actuels pouvant faire ce calcul étaient trop gros et trop pesants. Harvard a donc fait développer des circuits spécialisés ne faisant qu’une seule chose, mais très rapidement, et en les associant ensuite.
Pour cela les chercheurs ont construit un beaucoup plus grand robot ;abeille, qui n’a pas volé, mais qui portait des capteurs optiques en essai, de caractéristiques et performances diverses, et devant lesquels on projetait des images de l’environnement, comme si le robot volait réellement. On étudiait alors les réactions des ailes, la puissance consommée, les performances obtenues. Cette étude a permis d’optimiser en partie les capteurs et maintenant de commencer à étudier et à perfectionner les logiciels et les éléments de microprocesseurs, qui constitueront le cerveau de Robobee. Le problème est ensuite de coordonner les abeilles robot pour acquérir l’intelligence d’un essaim.
Seule, une abeille ne peut pas faire grand chose et c’est la ruche tout entière qui participe à la tâche, notamment d’exploration, en sélectionnât les zones intéressantes, en balisant les itinéraires, en répartissant les tâches.
Des chercheurs ont fait de nombreuses études dans le domaine de « l’intelligence des essaims », et des informaticiens ont fait des logiciels qui essaient de reproduire cette qualité. Mais ce n’est pas simple, car l’approche est très particulière : on ne peut programmer l’intelligence de chaque robot, on ne peut traiter l’essaim que comme un tout, chaque robot n’étant qu’un numéro, ce qui est un raisonnement complètement opposé à l’intelligence humaine qui est individuelle.
Un exemple simple : si on veut faire démarrer l’essaim de milliers de robot, on ne peut avoir le temps d’allumer un interrupteur sur chaque robot. Ce serait prohibitif et cela coûterait trop cher. Il faut donc un signal extérieur, partout le même où se trouve un robot qui le « réveille ».
Harvard a développé des programmes à partir d’organigrammes des tâches à accomplir, avec des conditions pour s’adapter à des conditions particulières, qui déclenchent de nouvelles tâches. Chose curieuse, ses informaticiens traitent l’essaim d’abeilles (robots), comme la propagation d’un fluide et chaque robot utilise un calcul de probabilités en fonction des conditions de l’environne-ment, pour déterminer s’il va accomplir une tâche donnée.
En définitive c’est l’étude d’un comportement collectif et d'un nouveau langage informatique qui est nécessaire pour traiter ce problème.Les chercheurs d’Harvard ont crée ainsi des robots qui ne ressemblent pas à Robotbee, mais sont déjà fabriqués et permettent d’étudier comment coordonner leur action entre eux, grâce à ces programmes originaux. Par exemple pour que l’un des robots puisse informer les autres de trouvailles intéressant l’ensemble. Ils espèrent ainsi avoir la collaboration d’autres équipes qui poursuivraient des buts différents de ceux de Robobee et pouvoir construire des robots d’ici une dizaine d’année pour une utilisation vers 2030.
En effet un essaim de robots pourrait être utilisé à des fins très diverses d’exploration, par exemple rechercher des blessés, des personnes ensevelies lors de catastrophes naturelles, (par exemple en détectant, selon les robots, des sons, de la chaleur, du CO2 etc…), pour la surveillance de lieux hostiles, pour la détection d’objets disséminés dans de grandes étendues. Actuellement on peut utiliser de grands drones très coûteux, qui risquent d’échouer dans leur tâche, très longue pour explorer toute la zone concernée.
Avec un essaim de plusieurs milliers de microrobots peu chers et fiables, certes la plupart des robots ne trouveront rien, mais il suffit que quelques uns trouvent ce qu’on cherchait, pour que l’essaim ait accompli la mission, dans un temps très court, ce qui est indispensable le plus souvent pour la réussite de l’opération.Là encore, j'ai recherché des informations plus récentes que ma documentation exhumée.
Il semble que le chercheurs aient opté pour que la ruche abrite un ordinateur puissant qui centraliserait les informations que transmettraient les robotsbees et les redistribuerait après traitement, indiquant individuellement à chaque robot la nouvelle zone à polliniser.
Le projet RoboBee pose des défis techniques si importants que les petits robots ne devraient pas voir le jour avant une dizaine voire une quinzaine d'années.
En attendant, il faut donc concentrer les efforts sur la sauvegarde des abeilles notamment agir pour interdire les pesticides qui les tuent. Cela ne semble pas aller vite non plus. votre commentaire Suivre le flux RSS des articles de cette rubrique Suivre le flux RSS des commentaires de cette rubrique
Suivre le flux RSS des articles de cette rubrique Suivre le flux RSS des commentaires de cette rubrique

















|
|
|
|